Light Robotics and Multi-Material 3D Printing: How to Build a Soft Humanoid
The production of lightweight and flexible robots is entering the industrial era thanks to innovative 3D printing techniques that integrate rigid and soft materials in a single process.
Soft robotics represents one of the most promising frontiers of modern automation, offering safer and more adaptable solutions compared to traditional rigid systems. At the center of this revolution is a multimaterial 3D printing process developed at Harvard University, which allows for the creation of flexible robotic structures with programmed movements, eliminating the need for molds and drastically accelerating prototyping times.
Introduction to Soft Robotics and the Advantages of Lightweight
Soft robotics represents a breakthrough compared to traditional rigid systems, offering greater safety and adaptability, especially in human contexts.
Soft robots distinguish themselves from their rigid predecessors by their ability to deform, adapt, and interact safely with human beings. This characteristic makes them ideal for medical applications, personal assistance, and environments where human-machine collaboration is essential. The soft robotics sector is still predominantly in the pure research phase, but the research and development landscape has begun to produce examples of early-stage commercialization.
Researchers have begun to focus on the genuine advantages of soft robotics compared to stiffer counterparts, and the open design capabilities of additive manufacturing have been fundamental to this evolution. The lightness of 3D-printed components, combined with the flexibility of soft materials, allows for the creation of robotic systems that consume less energy and present lower risks in case of accidental contact.
Multimaterial 3D Printing Technology
Multimaterial 3D printing allows for the direct integration of rigid and soft components, opening new possibilities for complex and functional structures.
Multimaterial 3D printing eliminates the limits of single-material printing or traditional casting, allowing designers to incorporate actuation paths, graded stiffness, and functional characteristics without additional assembly. This technology combines soft elastomers and more rigid polymers in a single build, overcoming the material integration limitations typical of conventional methods.
The process allows for the deposition of multiple materials through a single nozzle along a precise path, with the possibility of rapidly changing material and creating both simple and highly complex shapes. This ability to build parts directly from digital designs eliminates assembly bottlenecks, reduces delivery times, and allows for the incorporation of pneumatic channels and other functional elements during the printing process itself.
The multimaterial approach solves one of the most intractable problems associated with designing for the robotics industry: the creation of joints, articulations, and organic forms that would otherwise require molds and multiphase processes.
Harvard's Innovative Process: Rotating Head and Programmatic Inflation
The system developed by the Wyss Institute combines mechanical precision and morphological programmability through a rotating head and inflation-reactive materials.
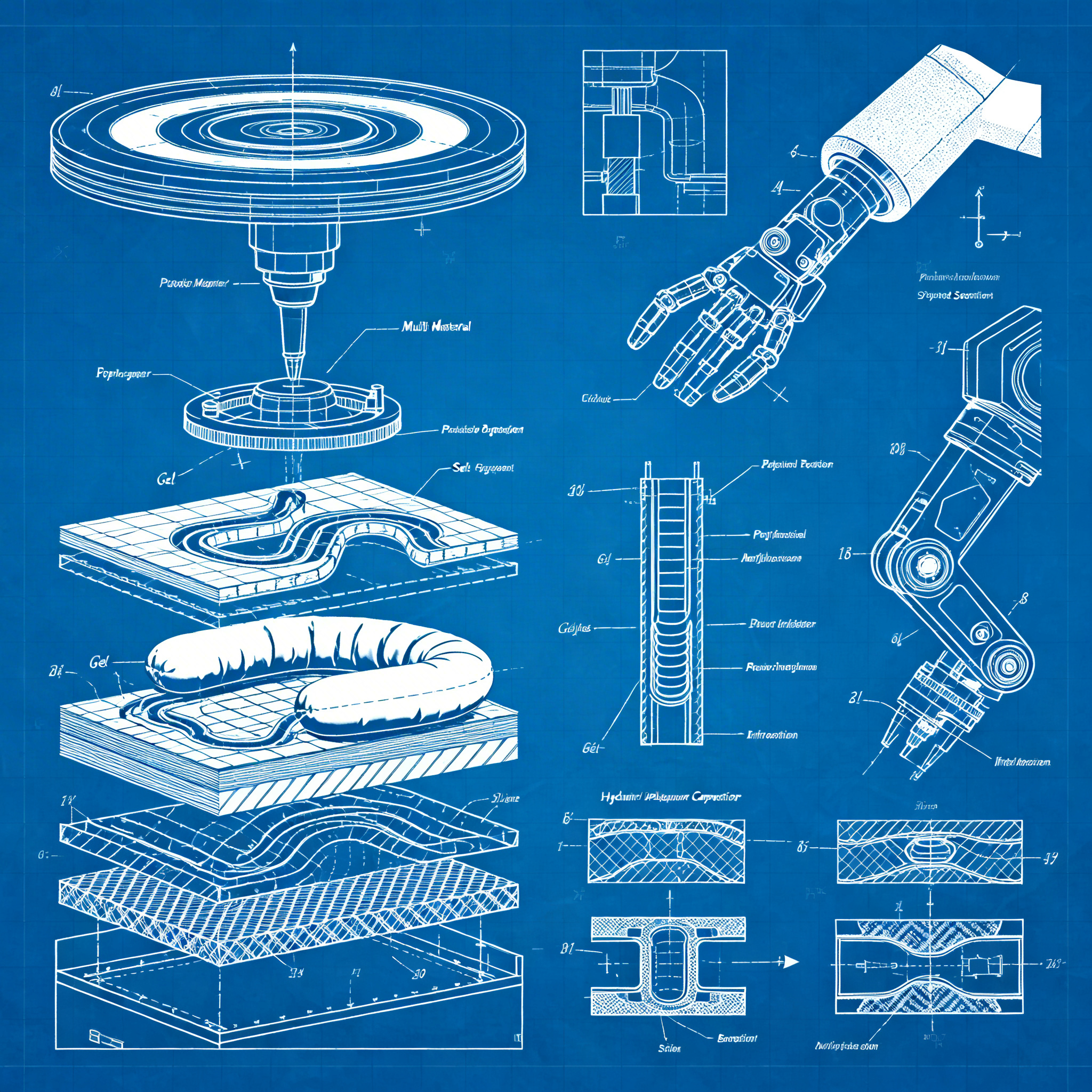
The process developed by researchers at Harvard's School of Engineering and Applied Sciences is based on a rotating printer with a multimaterial nozzle. Users first print a rigid polymer shell, then layer a gel-like polymer on top, creating a channel when the shell fully hardens, after which the softer substance is washed away.
Once the final product is inflated, the embedded design (“programmed shapes”) emerges completely, producing bio-inspired forms whose production would otherwise require molds and dies. As explained by Jackson Wilt, a graduate student who worked on the project: “We use two materials from a single outlet, which can be rotated to program the direction in which the robot bends when inflated. In this work, we do not have a mold. We print the structures, program them rapidly, and are able to customize the actuation quickly.”
The process involves designing an internal channel made of poloxamer, a polymer commonly used in hair gels. By adjusting the 3D printer's nozzle, its rotation speed, and the material flow rate, researchers were able to precisely control the shape, size, and orientation of each channel. The structure is then coated with a polyurethane membrane. Once solidified, the internal poloxamer core is removed, resulting in a hollow shell that can be pressurized to bend into various shapes.
This rotational movement not only allows for rapid material changes but also makes it possible to create complex geometries without the use of traditional molds. Researchers completed their work in the laboratory of Jennifer Lewis, Hansjorg Wyss Professor of Biologically Inspired Engineering at SEAS, who was the lead author of the first study based on the underlying process, published in 2022. That earlier project demonstrated how helical shapes could be leveraged to create joints and hinges for soft robotics.
Materials and Geometries: Gel-Like Polymers and Bio-Inspired Structures
The use of hybrid polymers allows for the creation of joints and curved surfaces without supports, reducing the weight and complexity of the design.
The choice of materials is crucial for the success of 3D-printed soft robotics. The Harvard process uses a combination of polyurethane for the rigid outer layer and poloxamer for the gel-like inner core. This combination allows for the creation of complex geometries with precise internal channels that, once pressurized with air, enable controlled and predictable movements.
The channels can be arranged in linear configurations as well as in flat or raised patterns. By adjusting parameters such as nozzle geometry, rotation speed, and material flow rate, researchers have controlled the dimensions, orientation, and geometry of each internal channel with high precision. This level of control allows for the creation of structures that contract, grasp objects, or expand in response to pressurization.
To demonstrate the versatility of the approach, the team printed a flower-like design in a spiral, continuous maze-like path. They also created a five-fingered handle with articulated sections that function similarly to knuckles, capable of bending in a controlled manner. Some of the example patterns detailed in the article in Advanced Materials include flowers and human hands, addressing one of the most intractable problems associated with design for the robotics industry.
The combination of rigid and gel-like polymers allows for the creation of complex geometries without the use of traditional molds, significantly reducing the overall weight of the robotic system and simplifying design. This approach solves critical problems in lightweight robotics, such as the realization of joints and bio-inspired forms that mimic natural structures.
Practical Applications: From Prosthetics to Robotic Assistants
The advantages of lightweight and flexible design find direct application in areas such as rehabilitation and personal assistance.
The potential applications of 3D-printed soft robotics are vast and promising. According to Wilt, the results highlight how rapid fabrication techniques like this could support applications ranging from surgical robotics to human assistive technologies. Predictable movement in soft robotics has traditionally depended on complex molds and multi-phase fabrication processes, slowing design iteration and limiting customization.
The new method is poised to accelerate the development of adaptive systems for surgical robotics, wearable assistive technologies, and flexible industrial automation. The ability to produce soft robotic devices with built-in, programmable movement eliminates assembly phases and enables faster prototyping, design freedom, and on-demand customization compared to conventional production.
In rehabilitation, soft robots can assist patients with reduced mobility, providing gentle and adaptable support. In personal assistance, they can help elderly people or individuals with
article written with the help of artificial intelligence systems
Q&A
- What are the main advantages of soft robotics compared to traditional robots?
- Soft robotics offers greater safety and adaptability, especially in environments with human presence. Flexible robots can deform and interact safely with human beings, making them ideal for medical and personal care applications.
- How does the multimaterial 3D printing developed by Harvard work?
- The process combines rigid and soft polymers into a single print, eliminating the need for assembly. Using a rotating head, researchers create structures with programmed internal channels that move when inflated.
- What materials are used in the Harvard process and what are they for?
- The main materials are polyurethane, for the rigid outer layer, and poloxamer, a gel-like polymer used for the inner core. The latter is removed after printing, leaving a hollow channel that allows controlled movement when pressurized.
- What practical applications does 3D printed soft robotics have?
- Applications include surgical robotics, wearable assistive technologies, lightweight prostheses, and flexible industrial automation systems. These robots can also support patients in rehabilitation or provide assistance to people with reduced mobility.
- How does this technology speed up the prototyping process?
- By eliminating the need for molds and multiphase processes, the new method allows for the direct printing of complex structures with built-in movement. This reduces production times and allows for rapid, on-demand customization.