Skalierbare Bewegungssteuerung für industrielle 3D-Drucker: Praktischer Leitfaden
Die Zukunft der Bewegungssteuerung bei industriellen 3D-Druckern folgt einem modularen und skalierbaren Ansatz, weit entfernt von klassischen monolithischen Controllern. Dyze Design hat ein System patentiert, das die “Bausteine” der Bewegungssteuerung trennt und es Herstellern ermöglicht, dieselbe Basis auf mehreren Modellen wiederzuverwenden, indem nur die notwendigen Module ausgetauscht werden.
Modulare Hardware-Architektur
Ein skalierbares Bewegungssteuerungssystem basiert auf einer flexiblen und wiederholbaren Hardware-Struktur, die darauf ausgelegt ist, sich an verschiedene mechanische Konfigurationen anzupassen, ohne von Grund auf neu entworfen werden zu müssen.
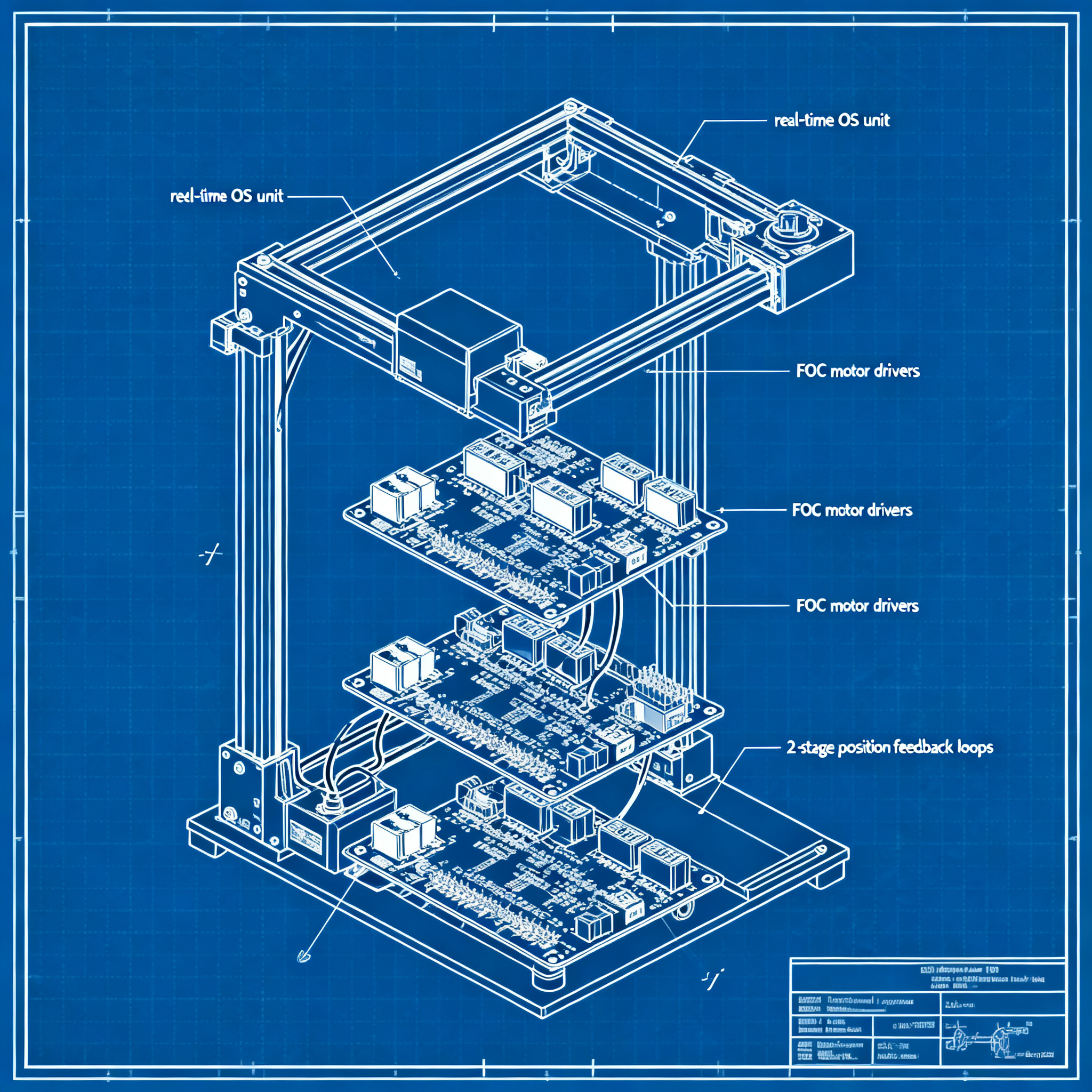
Der Aurora-Controller von Dyze Design ersetzt den traditionellen Controller durch eine integrierte Plattform, die aus Haupteinheiten und in Kaskade verbundenen Erweiterungskarten besteht. Der Hauptcontroller integriert ein Echtzeit-Betriebssystem und einen fortschrittlichen Motion-Planner.
Die Zusatzkarten verwalten IO, Sensoren, mehrere Extruder und Aktoren. Diese Struktur macht die Architektur anpassungsfähig an kartesische Drucker, Portalroboter für den Großmaßstab, Roboterarme oder kundenspezifische Systeme.
- Wiederverwendung derselben Steuerungsbasis für mehrere Maschinenmodelle
- Plattform-Updates ohne Neuentwicklung der gesamten Elektronik
- Anpassungsfähigkeit an verschiedene Produktionsszenarien, vom Großformat bis zu Mehrachsen-Systemen
Maschinenbauer können neue Varianten schnell konfigurieren. Der Wechsel von einer kartesischen Konfiguration zu einem Roboterarm erfordert nur den Austausch der spezifischen Module, nicht des gesamten Steuerungssystems.
Zweistufiges Feedback-Management
Die Implementierung eines zweistufigen Positionsfeedbacks erhöht die Steuerungsgenauigkeit erheblich, insbesondere in hochauflösenden Industrieanwendungen.
Das 2-Stage-Position-Feedback stellt einen der Schlüsselpunkte des Systems dar. Jeder Motor verfügt über einen eigenen lokalen Feedback-Kreis. Eine zweite Synchronisierungsebene koordiniert die Gesamtheit der Achsen.
Der Controller kann Abweichungen, Schrittverluste und Synchronisierungsprobleme schnell erkennen. Das Eingreifen erfolgt, bevor Fehler zu Druckausschuss führen, was bei Großformat- oder Mehrachsen-Maschinen entscheidend ist.
Das zweistufige Feedback trennt die lokale Steuerung des einzelnen Motors von der globalen Synchronisierung der Achsen. Dies ermöglicht schnelle Korrekturen, ohne die Gesamtkoordination der Bewegung zu beeinträchtigen.
Dedizierte FOC-Controller für jeden Motor verarbeiten das Encoder-Feedback und reagieren in Echtzeit. Dieser Ansatz erfordert teurere Hardware im Vergleich zu einfachen Schrittmotortreibern mit Step/Direction-Steuerung, gewährleistet aber eine höhere Genauigkeit.
Erweiterung und Updates im Laufe der Zeit
Die Modularität ermöglicht es, einzelne Funktionen zu erweitern oder zu aktualisieren, ohne das gesamte System ersetzen zu müssen, was die Betriebskosten und Ausfallzeiten reduziert.
Aurora akzeptiert G-Code von jedem Slicer und arbeitet mit bestehender Hardware zusammen. Diese Kompatibilität ermöglicht schrittweise Integrationen, ohne den Produktionsworkflow zu stören.
Der Reactive Motion Planner ändert Parameter wie Geschwindigkeit, Fluss oder Belüftung in Echtzeit als Reaktion auf Sensordaten. Das System wechselt von einer “offenen” Steuerung zu einer ständigen Prozessüberwachung, die automatisch anpasst, um eine konstante Qualität zu gewährleisten.
Modularer Upgrade-Prozess
- Bewertung: Module basierend auf spezifischen Produktionsanforderungen für ein Update identifizieren.
- Austausch: Installieren Sie die neuen Erweiterungskarten, während der bestehende Hauptcontroller beibehalten wird.
- Konfiguration: Softwareparameter aktualisieren, ohne die Gesamtarchitektur des Systems zu ändern.
Die Cloud-Analyse-Engine generiert Post-Druck-Berichte, 3D-Visualisierungen und zusammenfassende PDFs für jeden Auftrag. Diese Integration ermöglicht weniger manuelle Eingriffe und datengestützte Entscheidungen.
Die Trennung zwischen Hauptcontroller und erweiterbaren Modulen ermöglicht gezielte Wartung. Der Austausch einer fehlerhaften IO-Karte erfordert keine verlängerten Stillstände des Geräts oder eine vollständige Neuprogrammierung des Systems.
Fazit
Ein modulares Motion-Control-System ist nicht nur effizienter, sondern stellt auch den einzig praktikablen Weg dar, um der Entwicklung von Additive-Manufacturing-Maschinen zu begegnen. Die Fähigkeit, dasselbe System schnell an verschiedene mechanische Konfigurationen anzupassen, verkürzt Entwicklungszeiten und Ingenieurskosten.
Das zweistufige Feedback und die reaktive Bewegungsplanung gewährleisten Präzision und konstante Qualität. Die erweiterbare Architektur schützt die Investition im Laufe der Zeit und ermöglicht gezielte Upgrades ohne vollständige Ersetzungen.
Bewerten Sie sofort die Integration einer modularen Architektur in Ihr nächstes Hardware-Upgrade. Die Skalierbarkeit des Systems wird sich in Form von Produktionsflexibilität und reduzierten Betriebskosten auszahlen.
articolo scritto con l'ausilio di sistemi di intelligenza artificiale
Fragen & Antworten
- Was ist das Grundprinzip der modularen Architektur für die Bewegungssteuerung in industriellen 3D-Druckern?
- Die modulare Architektur basiert auf der Trennung der 'Blöcke' der Bewegungssteuerung, was die Wiederverwendung derselben Basis auf mehreren Modellen ermöglicht, indem nur die erforderlichen Module geändert werden. Dieser Ansatz bietet eine größere Flexibilität und Skalierbarkeit im Vergleich zu traditionellen monolithischen Controllern.
- Wie funktioniert das im Aurora-Controller implementierte zweistufige Feedback-System?
- Das zweistufige Feedback-System umfasst einen lokalen Feedback-Loop für jeden Motor und eine zweite Ebene der globalen Achsynchronisation. Dies ermöglicht es, Abweichungen schnell zu erkennen und in Echtzeit zu korrigieren, was die Präzision verbessert und Druckfehler reduziert.
- Was sind die Hauptvorteile der Verwendung einer modularen Architektur wie der von Aurora?
- Die Vorteile umfassen die Wiederverwendung derselben Steuerungsbasis für mehrere Modelle, Plattform-Updates ohne Neugestaltung der Elektronik und Anpassungsfähigkeit an verschiedene mechanische Konfigurationen. Darüber hinaus ermöglicht sie gezielte Wartung und reduziert die Stillstandszeiten während Upgrades.
- Wie wird der Aurora-Controller in bestehende Systeme integriert?
- Aurora ist mit jedem Slicer kompatibel, der G-Code generiert, und kann mit bestehender Hardware arbeiten. Diese Abwärtskompatibilität ermöglicht schrittweise Integrationen, ohne den Produktionsworkflow zu stören, und erleichtert die Einführung des Systems auch bei bereits im Einsatz befindlichen Maschinen.
- Welche Rolle spielt der Reactive Motion Planner im Aurora-System?
- Der Reactive Motion Planner ändert in Echtzeit Parameter wie Geschwindigkeit, Fluss und Belüftung als Reaktion auf Sensordaten. Dieser Übergang von einer offenen Steuerung zu einer kontinuierlichen Prozessüberwachung ermöglicht eine konstante Druckqualität und eine automatische Reaktion auf Prozessänderungen.