Control de Movimiento Escalable para Impresoras 3D Industriales: Guía Práctica
El futuro del control del movimiento en las impresoras 3D industriales pasa por un enfoque modular y escalable, muy lejos de los controladores monolíticos clásicos. Dyze Design ha patentado un sistema que separa los “bloques” de control del movimiento, permitiendo a los fabricantes reutilizar la misma base en varios modelos cambiando solo los módulos necesarios.
Arquitectura de Hardware Modular
Un sistema de control de movimiento escalable se basa en una estructura de hardware flexible y repetible, pensada para adaptarse a diversas configuraciones mecánicas sin rediseñar desde cero.
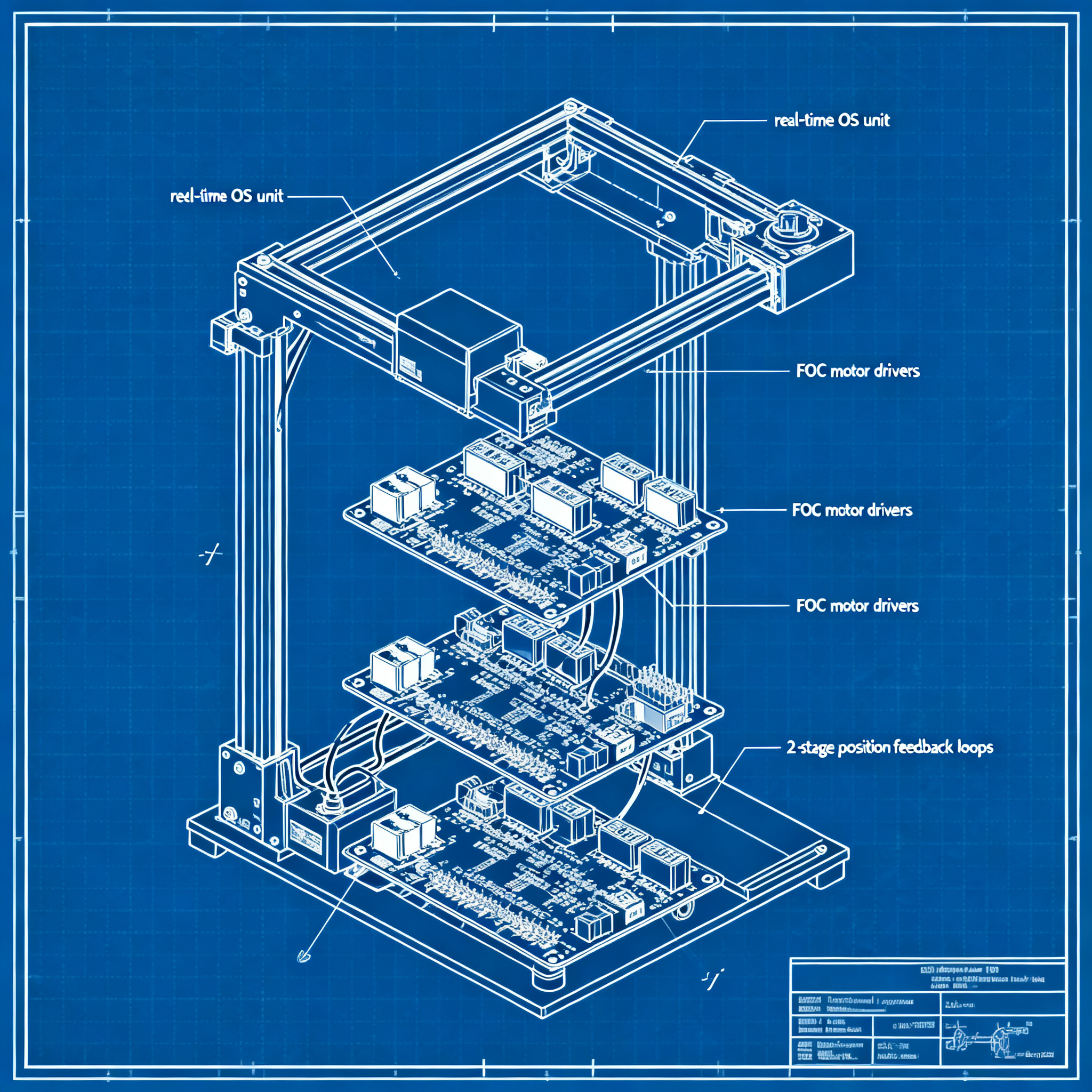
El controlador Aurora de Dyze Design sustituye al controlador tradicional con una plataforma integrada compuesta por unidades principales y tarjetas de expansión conectadas en cascada. El controlador principal integra un sistema operativo de tiempo real y un planificador de movimiento avanzado.
Las tarjetas adicionales gestionan IO, sensores, extrusores múltiples y actuadores. Esta estructura hace que la arquitectura sea adaptable a impresoras cartesianas, pórticos a gran escala, brazos robóticos o sistemas personalizados.
- Reutilización de la misma base de control en varios modelos de máquinas
- Actualizaciones de la plataforma sin rediseñar toda la electrónica
- Adaptabilidad a diversos escenarios productivos, desde el gran formato a los sistemas multi-eje
Los fabricantes de máquinas pueden configurar rápidamente nuevas variantes. Cambiar de una configuración cartesiana a un brazo robótico requiere solo la sustitución de los módulos específicos, no de todo el sistema de control.
Gestión del Feedback a Dos Etapas
Implementar un feedback de posición en dos fases aumenta sensiblemente la precisión del control, especialmente en aplicaciones industriales de alta definición.
El 2-Stage Position Feedback representa uno de los puntos clave del sistema. Cada motor dispone de su propio loop de feedback local. Un segundo nivel de sincronización coordina el conjunto de los ejes.
El controlador puede detectar rápidamente desviaciones, pérdidas de pasos y problemas de sincronización. La intervención ocurre antes de que los errores se traduzcan en descartes de impresión, aspecto crucial en máquinas de gran formato o multi-eje.
El feedback a dos niveles separa el control local del motor individual de la sincronización global de los ejes. Esto permite correcciones rápidas sin comprometer la coordinación general del movimiento.
Los controladores FOC dedicados para cada motor gestionan el feedback del encoder y reaccionan en tiempo real. Este enfoque requiere hardware más costoso en comparación con los simples drivers stepper con control step/direction, pero garantiza mayor precisión.
Expansión y actualizaciones en el tiempo
La modularidad permite expandir o actualizar funciones individuales sin tener que reemplazar todo el sistema, reduciendo los costos operativos y el tiempo de inactividad.
Aurora acepta G-code de cualquier slicer y funciona con hardware existente. Esta compatibilidad permite integraciones graduales sin alterar el flujo de trabajo productivo.
El Planificador de Movimiento Reactivo modifica en tiempo real parámetros como velocidad, flujo o ventilación en respuesta a los datos de los sensores. El sistema pasa de un control “abierto” a un monitoreo constante del proceso que regula automáticamente para mantener una calidad constante.
Proceso de actualización modular
- Evaluación: Identificar los módulos a actualizar según las necesidades productivas específicas.
- Sustitución: Instalar las nuevas tarjetas de expansión manteniendo el controlador principal existente.
- Configuración: Actualizar los parámetros de software sin modificar la arquitectura general del sistema.
El motor de análisis en la nube genera informes posteriores a la impresión, visualizaciones 3D y PDF resumidos para cada trabajo. Esta integración permite menos intervenciones manuales y decisiones basadas en datos concretos.
La separación entre el controlador principal y los módulos expansibles permite un mantenimiento dirigido. Reemplazar una tarjeta de E/S defectuosa no requiere paradas prolongadas de la máquina ni la reprogramación completa del sistema.
Conclusión
Un sistema modular de control de movimiento no solo es más eficiente, sino que representa la única vía práctica para abordar la evolución de las máquinas de fabricación aditiva. La capacidad de adaptar rápidamente el mismo sistema a diversas configuraciones mecánicas reduce los tiempos de desarrollo y los costos de ingeniería.
El feedback de dos etapas y la planificación reactiva del movimiento garantizan precisión y calidad constantes. La arquitectura expansible protege la inversión a lo largo del tiempo, permitiendo actualizaciones dirigidas sin reemplazos completos.
Evalúa de inmediato la integración de una arquitectura modular en tu próximo upgrade de hardware. La escalabilidad del sistema se retribuirá en términos de flexibilidad productiva y reducción de los costos operativos.
articolo scritto con l'ausilio di sistemi di intelligenza artificiale
Preguntas y respuestas
- ¿Cuál es el principio fundamental de la arquitectura modular para el control del movimiento en las impresoras 3D industriales?
- La arquitectura modular se basa en la separación de los 'bloques' de control del movimiento, permitiendo la reutilización de la misma base en varios modelos cambiando solo los módulos necesarios. Este enfoque permite una mayor flexibilidad y escalabilidad en comparación con los controladores monolíticos tradicionales.
- ¿Cómo funciona el sistema de feedback de dos etapas implementado en el controlador Aurora?
- El sistema de feedback de dos etapas prevé un bucle de feedback local para cada motor y un segundo nivel de sincronización global de los ejes. Esto permite detectar rápidamente desviaciones y corregirlas en tiempo real, mejorando la precisión y reduciendo los errores de impresión.
- ¿Cuáles son las principales ventajas de utilizar una arquitectura modular como la de Aurora?
- Las ventajas incluyen la reutilización de la misma base de control en varios modelos, actualizaciones de la plataforma sin rediseñar la electrónica y adaptabilidad a diversas configuraciones mecánicas. Además, permite el mantenimiento dirigido y reduce los tiempos de inactividad durante las actualizaciones.
- ¿Cómo se integra el controlador Aurora en los sistemas existentes?
- Aurora es compatible con cualquier slicer que genere G-code y puede trabajar con hardware existente. Esta retrocompatibilidad permite integraciones graduales sin alterar el flujo de trabajo productivo, facilitando la adopción del sistema también en maquinaria ya en uso.
- ¿Cuál es el papel del Reactive Motion Planner en el sistema Aurora?
- El Reactive Motion Planner modifica en tiempo real parámetros como velocidad, flujo y ventilación en respuesta a los datos de los sensores. Este paso de un control abierto a una supervisión constante del proceso permite mantener una calidad de impresión constante y reaccionar automáticamente a las variaciones del proceso.