Robotica Leggera e Stampa 3D Multimateriale: Come si Costruisce un Umanoide Morbido
La produzione di robot leggeri e flessibili sta entrando nell’era industriale grazie a tecniche innovative di stampa 3D che integrano materiali rigidi e morbidi in un unico processo.
La robotica morbida rappresenta una delle frontiere più promettenti dell’automazione moderna, offrendo soluzioni più sicure e adattabili rispetto ai sistemi rigidi tradizionali. Al centro di questa rivoluzione si trova un processo di stampa 3D multimateriale sviluppato presso l’Università di Harvard, che consente di creare strutture robotiche flessibili con movimenti programmati, eliminando la necessità di stampi e accelerando drasticamente i tempi di prototipazione.
Introduzione alla Robotica Morbida e ai Vantaggi del Leggero
La robotica morbida rappresenta una svolta rispetto ai sistemi rigidi tradizionali, offrendo maggiore sicurezza e adattabilità, specialmente nei contesti umani.
I robot morbidi si distinguono dai loro predecessori rigidi per la capacità di deformarsi, adattarsi e interagire in modo sicuro con gli esseri umani. Questa caratteristica li rende ideali per applicazioni mediche, assistenza personale e ambienti dove la collaborazione uomo-macchina è essenziale. Il settore della robotica morbida si trova ancora prevalentemente in fase di ricerca pura, ma il panorama della ricerca e sviluppo ha iniziato a produrre esempi di commercializzazione in fase iniziale.
I ricercatori hanno iniziato a concentrarsi sui vantaggi genuini della robotica morbida rispetto alle controparti più rigide, e le capacità di progettazione aperte della manifattura additiva sono state fondamentali per questa evoluzione. La leggerezza dei componenti stampati in 3D, combinata con la flessibilità dei materiali morbidi, consente di creare sistemi robotici che consumano meno energia e presentano minori rischi in caso di contatto accidentale.
La Tecnologia di Stampa 3D Multimateriale
La stampa 3D multimateriale consente l’integrazione diretta di componenti rigidi e morbidi, aprendo nuove possibilità per strutture complesse e funzionali.
La stampa 3D multimateriale elimina i limiti della stampa a materiale singolo o della colata tradizionale, permettendo ai progettisti di incorporare percorsi di attuazione, rigidità graduata e caratteristiche funzionali senza assemblaggio aggiuntivo. Questa tecnologia combina elastomeri morbidi e polimeri più rigidi in un’unica costruzione, superando le limitazioni di integrazione dei materiali tipiche dei metodi convenzionali.
Il processo consente di depositare più materiali attraverso un singolo ugello lungo un percorso preciso, con la possibilità di cambiare rapidamente materiale e creare forme sia semplici che altamente complesse. Questa capacità di costruire parti direttamente da progetti digitali elimina i colli di bottiglia dell’assemblaggio, riduce i tempi di consegna e permette di incorporare canali pneumatici e altri elementi funzionali durante la stampa stessa.
L’approccio multimateriale risolve uno dei problemi più intrattabili associati alla progettazione per l’industria robotica: la creazione di giunti, articolazioni e forme organiche che altrimenti richiederebbero stampi e processi multifase.
Il Processo Innovativo di Harvard: Testina Rotante e Inflazione Programmatica
Il sistema sviluppato dal Wyss Institute combina precisione meccanica e programmabilità morfologica tramite una testina rotante e materiali reattivi all’inflazione.
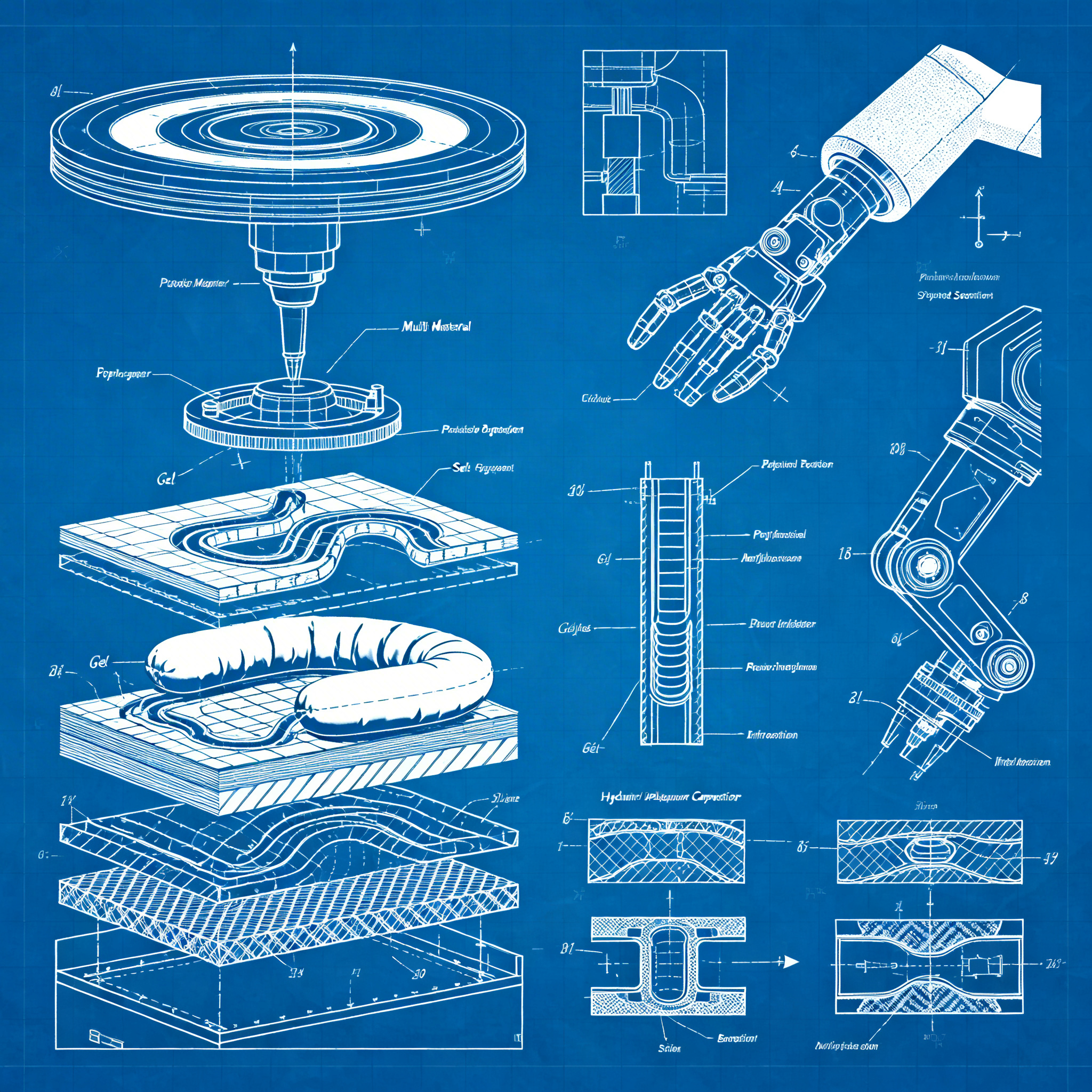
Il processo sviluppato dai ricercatori della School of Engineering and Applied Sciences di Harvard si basa su una stampante rotante con ugello multimateriale. Gli utenti stampano prima un guscio di polimero rigido, poi stratificano sopra un polimero simile a gel, ottenendo un canale quando il guscio si indurisce completamente, dopo di che la sostanza più morbida viene lavata via.
Una volta gonfiato il prodotto finale, il design incorporato (“forme programmate”) emerge completamente, producendo forme bioispirate la cui produzione richiederebbe altrimenti calchi e stampi. Come spiega Jackson Wilt, studente laureato che ha lavorato al progetto: “Utilizziamo due materiali da un’unica uscita, che può essere ruotata per programmare la direzione in cui il robot si piega quando viene gonfiato. In questo lavoro, non abbiamo uno stampo. Stampiamo le strutture, le programmiamo rapidamente e siamo in grado di personalizzare velocemente l’attuazione.”
Il processo prevede la progettazione di un canale interno realizzato in poloxamer, un polimero comunemente usato nei gel per capelli. Regolando l’ugello della stampante 3D, la sua velocità di rotazione e la portata del materiale, i ricercatori sono riusciti a controllare con precisione la forma, le dimensioni e l’orientamento di ogni canale. La struttura viene poi rivestita con una membrana di poliuretano. Una volta solidificata, viene rimosso il nucleo interno di poloxamer, ottenendo un guscio cavo che può essere pressurizzato per piegarsi in diverse forme.
Questo movimento rotatorio non solo consente un rapido cambio di materiale, ma rende anche possibile la creazione di geometrie complesse senza l’uso di stampi tradizionali. I ricercatori hanno completato il loro lavoro nel laboratorio di Jennifer Lewis, professoressa Hansjorg Wyss di Ingegneria Biologicamente Ispirata presso SEAS, che è stata l’autrice principale del primo studio basato sul processo sottostante, pubblicato nel 2022. Quel progetto precedente ha dimostrato come le forme elicoidali potessero essere sfruttate per creare giunti e cerniere per la robotica morbida.
Materiali e Geometrie: Polimeri Gel-Like e Strutture Bioispirate
L’utilizzo di polimeri ibridi permette la creazione di giunti e superfici curve senza supporti, riducendo peso e complessità del design.
La scelta dei materiali è cruciale per il successo della robotica morbida stampata in 3D. Il processo di Harvard utilizza una combinazione di poliuretano per lo strato esterno rigido e poloxamer per il nucleo interno gel-like. Questa combinazione permette di ottenere geometrie complesse con canali interni precisi che, una volta pressurizzati con aria, consentono movimenti controllati e prevedibili.
I canali possono essere disposti in configurazioni lineari così come in schemi piatti o elevati. Regolando parametri come la geometria dell’ugello, la velocità di rotazione e la portata del materiale, i ricercatori hanno controllato dimensioni, orientamento e geometria di ogni canale interno con alta precisione. Questo livello di controllo consente di creare strutture che si contraggono, afferrano oggetti o si espandono in risposta alla pressurizzazione.
Per dimostrare la versatilità dell’approccio, il team ha stampato a spirale un design simile a un fiore in un percorso continuo in stile labirinto. Hanno anche creato una maniglia a cinque dita con sezioni articolate che funzionano in modo simile alle nocche, capaci di piegarsi in modo controllato. Alcuni degli schemi di esempio dettagliati nell’articolo su Advanced Materials includono fiori e mani umane, affrontando uno dei problemi più intrattabili associati alla progettazione per l’industria robotica.
L’unione di polimeri rigidi e gel-like permette di ottenere geometrie complesse senza l’uso di stampi tradizionali, riducendo significativamente il peso complessivo del sistema robotico e semplificando la progettazione. Questo approccio risolve problemi critici nella robotica leggera, come la realizzazione di articolazioni e forme bioispirate che imitano strutture naturali.
Applicazioni Pratiche: Dalle Protesi agli Assistenti Robotici
I vantaggi del design leggero e flessibile trovano applicazione diretta in ambiti come la riabilitazione e l’assistenza personale.
Le potenziali applicazioni della robotica morbida stampata in 3D sono vaste e promettenti. Secondo Wilt, i risultati evidenziano come tecniche di fabbricazione rapida come questa potrebbero supportare applicazioni che spaziano dalla robotica chirurgica alle tecnologie assistive umane. Il movimento prevedibile nella robotica morbida ha tradizionalmente dipeso da stampi complessi e processi di fabbricazione multifase, rallentando l’iterazione del design e limitando la personalizzazione.
Il nuovo metodo è destinato ad accelerare lo sviluppo di sistemi adattivi per la robotica chirurgica, le tecnologie assistive indossabili e l’automazione industriale flessibile. La capacità di produrre dispositivi robotici morbidi con movimento incorporato e programmabile elimina le fasi di assemblaggio e consente prototipazione più rapida, libertà di progettazione e personalizzazione su richiesta rispetto alla produzione convenzionale.
Nella riabilitazione, i robot morbidi possono assistere pazienti con mobilità ridotta, fornendo supporto delicato e adattabile. Nell’assistenza personale, possono aiutare anziani o persone con
articolo scritto con l'ausilio di sistemi di intelligenza artificiale
Q&A
- Quali sono i principali vantaggi della robotica morbida rispetto ai robot tradizionali?
- La robotica morbida offre maggiore sicurezza e adattabilità, specialmente in ambienti con presenza umana. I robot flessibili possono deformarsi e interagire in modo sicuro con gli esseri umani, risultando ideali per applicazioni mediche e di assistenza personale.
- Come funziona la stampa 3D multimateriale sviluppata da Harvard?
- Il processo combina polimeri rigidi e morbidi in un’unica stampa, eliminando la necessità di assemblaggio. Utilizzando una testina rotante, i ricercatori creano strutture con canali interni programmati che si muovono quando vengono gonfiati.
- Quali materiali vengono utilizzati nel processo di Harvard e a cosa servono?
- I materiali principali sono il poliuretano, per lo strato esterno rigido, e il poloxamer, un polimero gel-like utilizzato per il nucleo interno. Quest’ultimo viene rimosso dopo la stampa, lasciando un canale cavo che permette il movimento controllato quando pressurizzato.
- Quali applicazioni pratiche ha la robotica morbida stampata in 3D?
- Le applicazioni includono robotica chirurgica, tecnologie assistive indossabili, protesi leggere e sistemi di automazione industriale flessibili. Questi robot possono anche supportare pazienti in riabilitazione o fornire assistenza a persone con mobilità ridotta.
- In che modo questa tecnologia accelera il processo di prototipazione?
- Eliminando la necessità di stampi e processi multifase, il nuovo metodo consente di stampare direttamente strutture complesse con movimento incorporato. Ciò riduce i tempi di produzione e permette una personalizzazione rapida e su richiesta.