Leichte Robotik und 3D-Multimaterial-Druck: Wie man einen weichen Humanoiden baut
Die Produktion von leichten und flexiblen Robotern betritt dank innovativer 3D-Drucktechniken, die harte und weiche Materialien in einem einzigen Prozess integrieren, das industrielle Zeitalter.
Die weiche Robotik stellt eine der vielversprechendsten Grenzen der modernen Automatisierung dar und bietet sicherere und anpassungsfähigere Lösungen im Vergleich zu traditionellen starren Systemen. Im Zentrum dieser Revolution steht ein multimaterialer 3D-Druckprozess, der an der Harvard University entwickelt wurde und es ermöglicht, flexible Roboterstrukturen mit programmierten Bewegungen zu schaffen, wodurch die Notwendigkeit von Formen entfällt und die Prototypenzeit drastisch beschleunigt wird.
Einführung in die weiche Robotik und die Vorteile von Leichtbau
Die weiche Robotik stellt im Vergleich zu traditionellen starren Systemen einen Wendepunkt dar und bietet größere Sicherheit und Anpassungsfähigkeit, insbesondere in menschlichen Umgebungen.
Weiche Roboter unterscheiden sich von ihren starren Vorgängern durch die Fähigkeit, sich zu verformen, anzupassen und sicher mit Menschen zu interagieren. Diese Eigenschaft macht sie ideal für medizinische Anwendungen, persönliche Assistenz und Umgebungen, in denen die Mensch-Maschine-Kollaboration essenziell ist. Die weiche Robotik befindet sich noch hauptsächlich in der reinen Forschungsphase, aber die Forschungs- und Entwicklungslandschaft hat begonnen, Beispiele für die frühe Kommerzialisierung hervorzubringen.
Forscher haben begonnen, sich auf die echten Vorteile der weichen Robotik gegenüber den steiferen Gegenstücken zu konzentrieren, und die offenen Designfähigkeiten der additiven Fertigung waren entscheidend für diese Entwicklung. Die Leichtigkeit der 3D-gedruckten Komponenten, kombiniert mit der Flexibilität der weichen Materialien, ermöglicht es, Robotersysteme zu schaffen, die weniger Energie verbrauchen und bei versehentlichem Kontakt geringere Risiken bergen.
Die Multimaterial-3D-Drucktechnologie
Der Multimaterial-3D-Druck ermöglicht die direkte Integration von harten und weichen Komponenten und eröffnet neue Möglichkeiten für komplexe und funktionale Strukturen.
Der Multimaterial-3D-Druck eliminiert die Grenzen des Einmaterialdrucks oder des traditionellen Gießens und ermöglicht es Designern, Aktuierungspfade, abgestufte Steifigkeiten und funktionale Merkmale ohne zusätzliche Montage zu integrieren. Diese Technologie kombiniert weiche Elastomere und festere Polymere in einem einzigen Bauteil und überwindet die Integrationsbeschränkungen von Materialien, die für konventionelle Methoden typisch sind.
Das Verfahren ermöglicht das Auftragen mehrerer Materialien über eine einzelne Düse entlang eines präzisen Pfades, mit der Möglichkeit, das Material schnell zu wechseln und sowohl einfache als auch hochkomplexe Formen zu erstellen. Diese Fähigkeit, Teile direkt aus digitalen Projekten zu bauen, eliminiert Engpässe beim Zusammenbau, verkürzt die Lieferzeiten und ermöglicht es, pneumatische Kanäle und andere funktionale Elemente während des Drucks selbst zu integrieren.
Der Multimaterial-Ansatz löst eines der schwierigsten Probleme im Zusammenhang mit dem Design für die Robotikindustrie: die Erstellung von Gelenken, Gliedmaßen und organischen Formen, die andernfalls Spritzgussformen und Mehrphasenprozesse erfordern würden.
Der innovative Prozess von Harvard: Rotierender Kopf und programmatische Inflation
Das vom Wyss Institute entwickelte System kombiniert mechanische Präzision und morphologische Programmierbarkeit durch einen rotierenden Kopf und materialien, die auf Inflation reagieren.
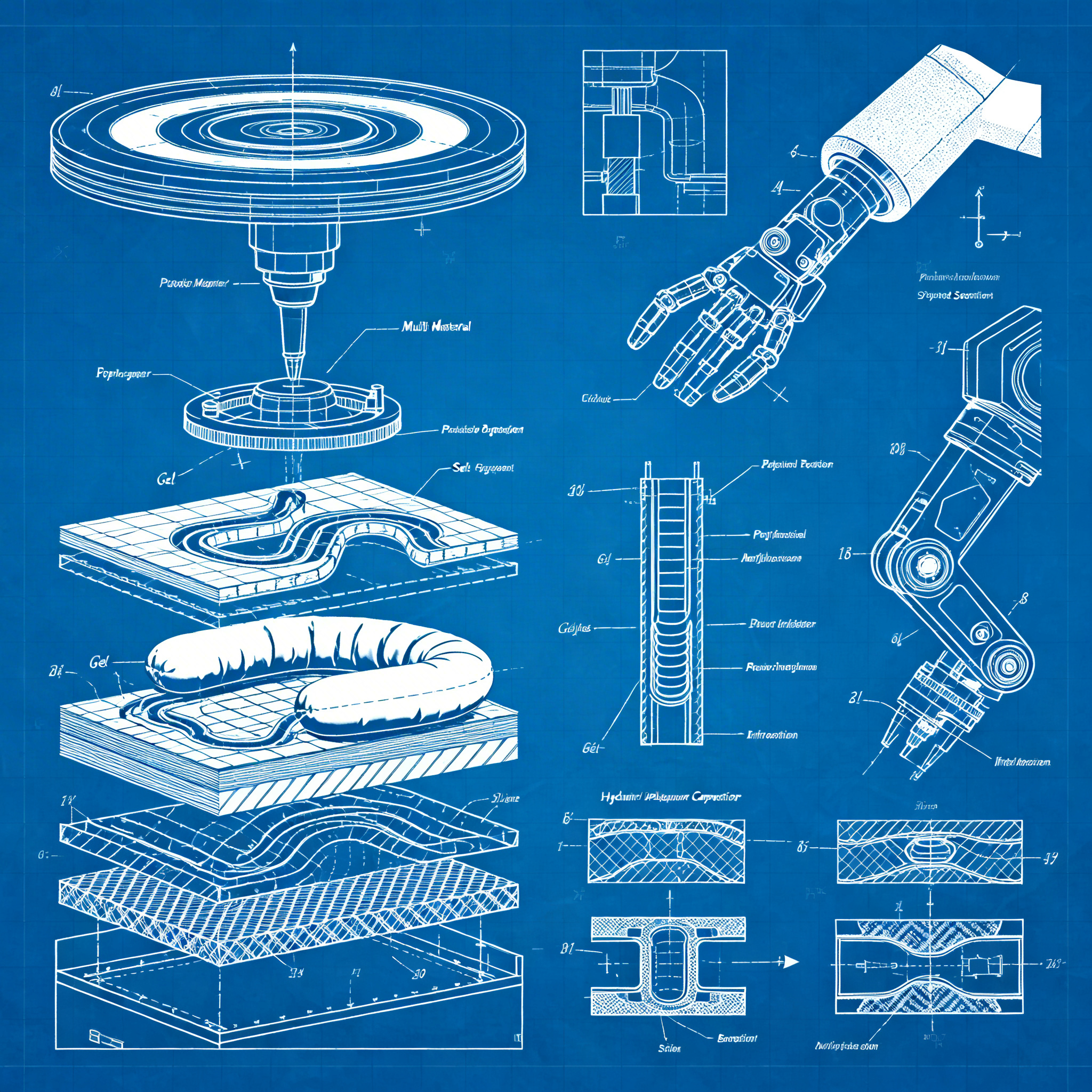
Der von Forschern der School of Engineering and Applied Sciences von Harvard entwickelte Prozess basiert auf einem rotierenden Drucker mit Multimaterial-Düse. Die Benutzer drucken zuerst eine Hülle aus festem Polymer und laminieren dann ein gelähnliches Polymer darüber, wodurch ein Kanal entsteht, wenn sich die Hülle vollständig verhärtet, woraufhin die weichere Substanz ausgewaschen wird.
Sobald das Endprodukt aufgeblasen wird, tritt das integrierte Design (“programmierte Formen”) vollständig hervor und erzeugt bioinspirierte Formen, deren Herstellung andernfalls Matrizen und Formen erfordern würde. Wie Jackson Wilt, ein Absolvent, der am Projekt gearbeitet hat, erklärt: “Wir verwenden zwei Materialien aus einem einzigen Ausgang, der gedreht werden kann, um die Richtung zu programmieren, in die der Roboter gebogen wird, wenn er aufgeblasen wird. In dieser Arbeit haben wir keine Form. Wir drucken die Strukturen, programmieren sie schnell und sind in der Lage, die Aktuierung schnell anzupassen.”
Der Prozess beinhaltet die Gestaltung eines internen Kanals aus Poloxamer, einem Polymer, das häufig in Haargelen verwendet wird. Indem sie die Düse des 3D-Druckers, ihre Rotationsgeschwindigkeit und den Materialfluss regulieren, konnten die Forscher die Form, die Größe und die Ausrichtung jedes Kanals präzise steuern. Die Struktur wird dann mit einer Polyurethanmembran beschichtet. Nach der Verfestigung wird der innere Kern aus Poloxamer entfernt, wodurch eine hohle Hülle entsteht, die unter Druck gesetzt werden kann, um sich in verschiedene Formen zu biegen.
Diese Drehbewegung ermöglicht nicht nur einen schnellen Materialwechsel, sondern auch die Erstellung komplexer Geometrien ohne die Verwendung traditioneller Formen. Die Forscher schlossen ihre Arbeit im Labor von Jennifer Lewis, Professorin Hansjorg Wyss für biologisch inspirierte Ingenieurwissenschaften an der SEAS, ab, die die Hauptautorin der ersten Studie war, die auf dem zugrunde liegenden Prozess basiert und 2022 veröffentlicht wurde. Dieses vorherige Projekt zeigte, wie Spiralformen genutzt werden können, um Gelenke und Scharniere für die weiche Robotik zu erstellen.
Materialien und Geometrien: Gelähnliche Polymere und bioinspirierte Strukturen
Die Verwendung von Hybridpolymeren ermöglicht die Erstellung von Gelenken und gekrümmten Oberflächen ohne Stützstrukturen, wodurch Gewicht und Designkomplexität reduziert werden.
Die Materialauswahl ist entscheidend für den Erfolg des 3D-gedruckten Softrobotik. Der Harvard-Prozess verwendet eine Kombination aus Polyuretan für die äußere starre Schicht und Poloxamer für den gelartigen Kern. Diese Kombination ermöglicht die Erzeugung komplexer Geometrien mit präzisen internen Kanälen, die, sobald sie mit Luft unter Druck gesetzt werden, kontrollierte und vorhersehbare Bewegungen ermöglichen.
Die Kanäle können in linearen Konfigurationen sowie in flachen oder erhöhten Anordnungen angeordnet werden. Durch die Anpassung von Parametern wie Geometrie der Düse, Rotationsgeschwindigkeit und Materialdurchfluss haben Forscher die Abmessungen, Ausrichtung und Geometrie jedes internen Kanals mit hoher Präzision gesteuert. Dieses Maß an Kontrolle ermöglicht die Erzeugung von Strukturen, die sich zusammenziehen, Objekte greifen oder als Reaktion auf die Druckbeaufschlagung ausdehnen.
Um die Vielseitigkeit des Ansatzes zu demonstrieren, hat das Team ein blumenähnliches Design spiralartig in einem kontinuierlichen, labyrinthischen Pfad gedruckt. Sie haben auch einen Fünf-Finger-Griff mit gegliederten Abschnitten erstellt, die ähnlich wie Knöchel funktionieren und sich kontrolliert biegen können. Einige der Beispieldesigns, die im Artikel in Advanced Materials detailliert beschrieben sind, umfassen Blumen und menschliche Hände und befassen sich mit einem der schwierigsten Probleme im Zusammenhang mit dem Design für die Robotikindustrie.
Die Kombination von starren und gelartigen Polymeren ermöglicht die Erzeugung komplexer Geometrien ohne die Verwendung traditioneller Formen, was das Gesamtgewicht des Robotersystems erheblich reduziert und das Design vereinfacht. Dieser Ansatz löst kritische Probleme in der Leichtbau-Robotik, wie die Erzeugung von Gelenken und bio-inspirierten Formen, die natürliche Strukturen nachahmen.
Praktische Anwendungen: Von Prothesen zu Roboter-Assistenten
Die Vorteile des leichten und flexiblen Designs finden direkte Anwendung in Bereichen wie Rehabilitation und persönlicher Assistenz.
Die potenziellen Anwendungen des 3D-gedruckten Softrobotik sind weitreichend und vielversprechend. Laut Wilt zeigen die Ergebnisse, wie schnelle Fertigungstechniken wie diese Anwendungen unterstützen könnten, die von chirurgischer Robotik bis zu menschlichen Assistenztechnologien reichen. Die vorhersehbare Bewegung in der Softrobotik hing traditionell von komplexen Formen und mehrstufigen Fertigungsprozessen ab, was die Designiteration verlangsamte und die Personalisierung einschränkte.
Die neue Methode soll die Entwicklung von adaptiven Systemen für die chirurgische Robotik, tragbare Assistenztechnologien und flexible industrielle Automatisierung beschleunigen. Die Fähigkeit, weiche Robotergeräte mit eingebetteter und programmierbarer Bewegung herzustellen, eliminiert die Montagephasen und ermöglicht schnellere Prototypenerstellung, Designfreiheit und Personalisierung auf Abruf im Vergleich zur konventionellen Produktion.
In der Rehabilitation können weiche Roboter Patienten mit eingeschränkter Mobilität unterstützen, indem sie sanften und anpassbaren Support bieten. In der persönlichen Assistenz können sie ältere Menschen oder Menschen mit
articolo scritto con l'ausilio di sistemi di intelligenza artificiale
Fragen & Antworten
- Was sind die Hauptvorteile der Softrobotik im Vergleich zu traditionellen Robotern?
- Die weiche Robotik bietet mehr Sicherheit und Anpassungsfähigkeit, insbesondere in Umgebungen mit menschlicher Anwesenheit. Flexible Roboter können sich verformen und sicher mit Menschen interagieren, was sie ideal für medizinische und persönliche Assistenzanwendungen macht.
- Wie funktioniert der von Harvard entwickelte 3D-Druck mit mehreren Materialien?
- Der Prozess kombiniert harte und weiche Polymere in einem einzigen Druckvorgang und eliminiert so die Notwendigkeit der Montage. Mithilfe eines rotierenden Druckkopfes erzeugen Forscher Strukturen mit programmierten internen Kanälen, die sich bewegen, wenn sie aufgeblasen werden.
- Welche Materialien werden im Harvard-Prozess verwendet und wozu dienen sie?
- Die Hauptmaterialien sind Polyuretan für die harte Außenschicht und Poloxamer, ein gelartiges Polymer, das für den inneren Kern verwendet wird. Letzteres wird nach dem Druck entfernt und hinterlässt einen hohlen Kanal, der bei Druckbelastung eine kontrollierte Bewegung ermöglicht.
- Welche praktischen Anwendungen hat der 3D-gedruckte weiche Roboter?
- Die Anwendungen umfassen Chirurgierobotik, tragbare Assistenztechnologien, leichte Prothesen und flexible Industriesysteme zur Automatisierung. Diese Roboter können auch Patienten bei der Rehabilitation unterstützen oder Menschen mit eingeschränkter Mobilität helfen.
- Wie beschleunigt diese Technologie den Prototypenprozess?
- Durch den Wegfall von Formen und Mehrphasenprozessen ermöglicht die neue Methode den direkten Druck komplexer Strukturen mit integrierter Bewegung. Dies reduziert die Produktionszeiten und ermöglicht eine schnelle, bedarfsgerechte Anpassung.