Robótica Ligera y Estampación 3D Multimaterial: Cómo se Construye un Humanoide Blando
La producción de robots ligeros y flexibles está entrando en la era industrial gracias a técnicas innovadoras de impresión 3D que integran materiales rígidos y blandos en un único proceso.
La robótica blanda representa una de las fronteras más prometedoras de la automatización moderna, ofreciendo soluciones más seguras y adaptables en comparación con los sistemas rígidos tradicionales. En el centro de esta revolución se encuentra un proceso de impresión 3D multimaterial desarrollado en la Universidad de Harvard, que permite crear estructuras robóticas flexibles con movimientos programados, eliminando la necesidad de moldes y acelerando drásticamente los tiempos de prototipado.
Introducción a la Robótica Blanda y a las Ventajas de la Ligereza
La robótica blanda representa un punto de inflexión en comparación con los sistemas rígidos tradicionales, ofreciendo mayor seguridad y adaptabilidad, especialmente en contextos humanos.
Los robots blandos se distinguen de sus predecesores rígidos por su capacidad de deformarse, adaptarse e interactuar de forma segura con los seres humanos. Esta característica los hace ideales para aplicaciones médicas, asistencia personal y entornos donde la colaboración hombre-máquina es esencial. El sector de la robótica blanda se encuentra todavía predominantemente en fase de investigación pura, pero el panorama de investigación y desarrollo ha comenzado a producir ejemplos de comercialización en fase inicial.
Los investigadores han comenzado a centrarse en las ventajas genuinas de la robótica blanda frente a las contrapartes más rígidas, y las capacidades de diseño abierto de la manufactura aditiva han sido fundamentales para esta evolución. La ligereza de los componentes impresos en 3D, combinada con la flexibilidad de los materiales blandos, permite crear sistemas robóticos que consumen menos energía y presentan menores riesgos en caso de contacto accidental.
La Tecnología de Impresión 3D Multimaterial
La impresión 3D multimaterial permite la integración directa de componentes rígidos y blandos, abriendo nuevas posibilidades para estructuras complejas y funcionales.
La impresión 3D multimaterial elimina los límites de la impresión de material único o de la fundición tradicional, permitiendo a los diseñadores incorporar rutas de actuación, rigidez graduada y características funcionales sin ensamblaje adicional. Esta tecnología combina elastómeros blandos y polímeros más rígidos en una única construcción, superando las limitaciones de integración de materiales típicas de los métodos convencionales.
El proceso permite depositar más materiales a través de un único inyector a lo largo de un recorrido preciso, con la posibilidad de cambiar rápidamente de material y crear formas tanto simples como altamente complejas. Esta capacidad de construir piezas directamente a partir de diseños digitales elimina los cuellos de botella del ensamblaje, reduce los tiempos de entrega y permite incorporar canales neumáticos y otros elementos funcionales durante el propio proceso de impresión.
El enfoque multimaterial resuelve uno de los problemas más intratables asociados al diseño para la industria robótica: la creación de uniones, articulaciones y formas orgánicas que de otro modo requerirían moldes y procesos multifase.
El Proceso Innovador de Harvard: Cabezal Rotativo e Inflado Programable
El sistema desarrollado por el Wyss Institute combina precisión mecánica y programabilidad morfológica mediante un cabezal rotativo y materiales reactivos al inflado.
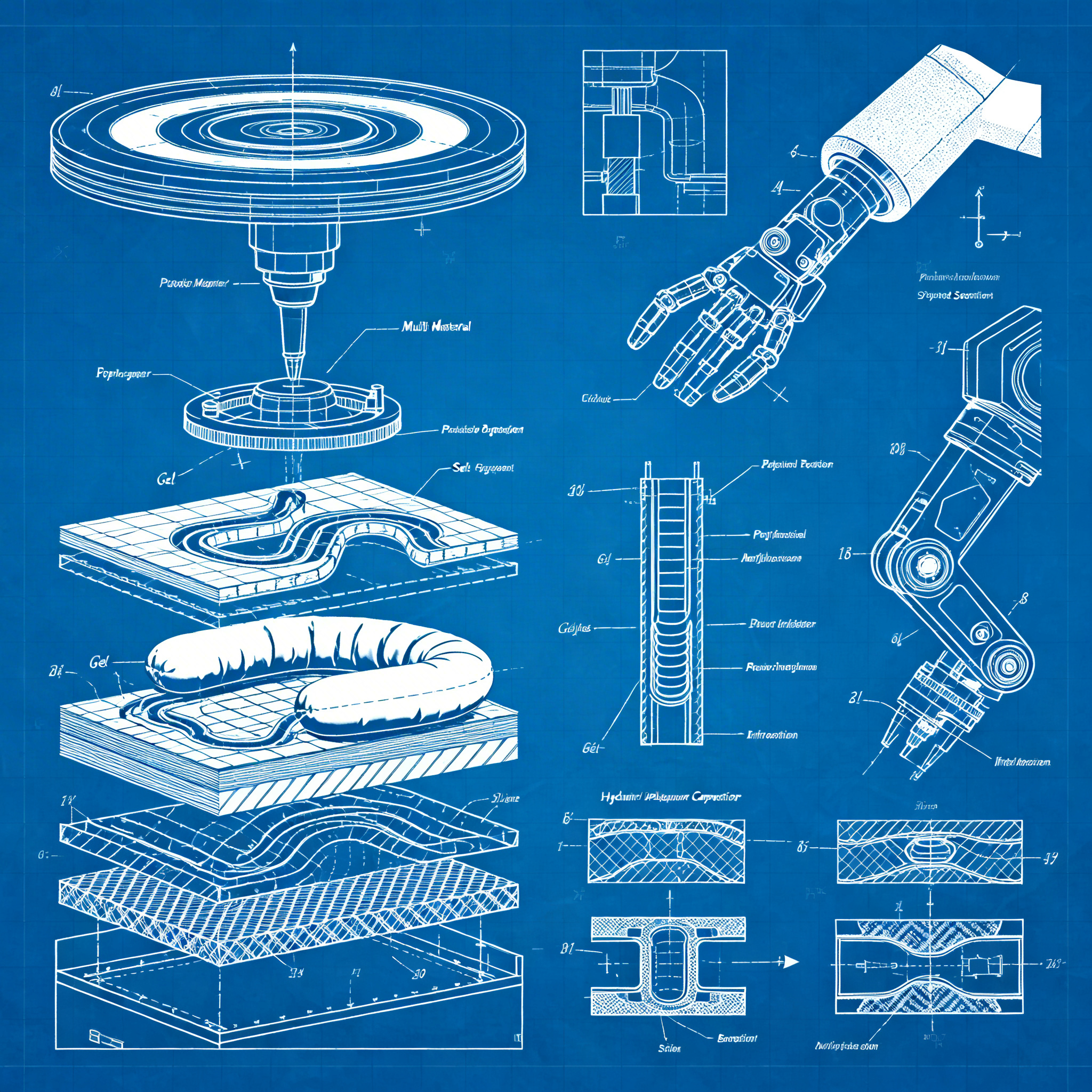
El proceso desarrollado por los investigadores de la School of Engineering and Applied Sciences de Harvard se basa en una impresora rotativa con inyector multimaterial. Los usuarios imprimen primero una carcasa de polímero rígido, luego estratifican encima un polímero similar al gel, obteniendo un canal cuando la carcasa se endurece completamente, después de lo cual la sustancia más blanda se lava.
Una vez inflado el producto final, el diseño incorporado (“formas programadas”) emerge completamente, produciendo formas bioinspiradas cuya producción requeriría de otro modo moldes y troqueles. Como explica Jackson Wilt, estudiante de posgrado que trabajó en el proyecto: “Utilizamos dos materiales desde una única salida, que puede rotarse para programar la dirección en la que el robot se dobla cuando se infla. En este trabajo, no tenemos un molde. Imprimimos las estructuras, las programamos rápidamente y podemos personalizar rápidamente la actuación”.”
El proceso prevé el diseño de un canal interno realizado en poloxámero, un polímero comúnmente usado en geles para el cabello. Ajustando el inyector de la impresora 3D, su velocidad de rotación y el caudal del material, los investigadores lograron controlar con precisión la forma, las dimensiones y la orientación de cada canal. La estructura se recubre luego con una membrana de poliuretano. Una vez solidificada, se elimina el núcleo interno de poloxámero, obteniendo una carcasa hueca que puede presurizarse para doblarse en diferentes formas.
Este movimiento rotatorio no solo permite un rápido cambio de material, sino que también hace posible la creación de geometrías complejas sin el uso de moldes tradicionales. Los investigadores completaron su trabajo en el laboratorio de Jennifer Lewis, profesora Hansjorg Wyss de Ingeniería Biológicamente Inspirada en SEAS, que fue la autora principal del primer estudio basado en el proceso subyacente, publicado en 2022. Ese proyecto anterior demostró cómo las formas helicoidales podían aprovecharse para crear uniones y bisagras para la robótica blanda.
Materiales y Geometrías: Polímeros tipo Gel y Estructuras Bioinspiradas
El uso de polímeros híbridos permite la creación de uniones y superficies curvas sin soportes, reduciendo el peso y la complejidad del diseño.
La elección de materiales es crucial para el éxito de la robótica blanda impresa en 3D. El proceso de Harvard utiliza una combinación de poliuretano para la capa externa rígida y poloxamer para el núcleo interno tipo gel. Esta combinación permite obtener geometrías complejas con canales internos precisos que, una vez presurizados con aire, permiten movimientos controlados y predecibles.
Los canales pueden disponerse en configuraciones lineares así como en esquemas planos o elevados. Al ajustar parámetros como la geometría del boquilla, la velocidad de rotación y el caudal del material, los investigadores han controlado dimensiones, orientación y geometría de cada canal interno con alta precisión. Este nivel de control permite crear estructuras que se contraen, agarran objetos o se expanden en respuesta a la presurización.
Para demostrar la versatilidad del enfoque, el equipo ha impreso en espiral un diseño similar a una flor en un recorrido continuo estilo laberinto. También crearon una manija de cinco dedos con secciones articuladas que funcionan de manera similar a las nudillos, capaces de doblarse de forma controlada. Algunos de los esquemas de ejemplo detallados en el artículo sobre Advanced Materials incluyen flores y manos humanas, abordando uno de los problemas más intratables asociados al diseño para la industria robótica.
La unión de polímeros rígidos y tipo gel permite obtener geometrías complejas sin el uso de moldes tradicionales, reduciendo significativamente el peso total del sistema robótico y simplificando el diseño. Este enfoque resuelve problemas críticos en la robótica ligera, como la realización de articulaciones y formas bioinspiradas que imitan estructuras naturales.
Aplicaciones Prácticas: Desde Prótesis hasta Asistentes Robóticos
Las ventajas del diseño ligero y flexible encuentran aplicación directa en ámbitos como la rehabilitación y la asistencia personal.
Las aplicaciones potenciales de la robótica blanda impresa en 3D son vastas y prometedoras. Según Wilt, los resultados destacan cómo técnicas de fabricación rápida como esta podrían soportar aplicaciones que abarcan desde la robótica quirúrgica hasta las tecnologías asistivas humanas. El movimiento predecible en la robótica blanda ha dependido tradicionalmente de moldes complejos y procesos de fabricación multifase, ralentizando la iteración del diseño y limitando la personalización.
El nuevo método está destinado a acelerar el desarrollo de sistemas adaptativos para la robótica quirúrgica, las tecnologías asistivas portátiles y la automatización industrial flexible. La capacidad de producir dispositivos robóticos blandos con movimiento incorporado y programable elimina las fases de ensamblaje y permite prototipado más rápido, libertad de diseño y personalización bajo demanda en comparación con la producción convencional.
En la rehabilitación, los robots blandos pueden asistir a pacientes con movilidad reducida, proporcionando soporte delicado y adaptable. En la asistencia personal, pueden ayudar a personas mayores o personas con
articolo scritto con l'ausilio di sistemi di intelligenza artificiale
Preguntas y respuestas
- ¿Cuáles son los principales beneficios de la robótica blanda frente a los robots tradicionales?
- La robótica blanda ofrece mayor seguridad y adaptabilidad, especialmente en entornos con presencia humana. Los robots flexibles pueden deformarse e interactuar de manera segura con los seres humanos, resultando ideales para aplicaciones médicas y de asistencia personal.
- ¿Cómo funciona la impresión 3D multimaterial desarrollada por Harvard?
- El proceso combina polímeros rígidos y blandos en una única impresión, eliminando la necesidad de ensamblaje. Utilizando una cabeza rotativa, los investigadores crean estructuras con canales internos programados que se mueven cuando se inflan.
- ¿Qué materiales se utilizan en el proceso de Harvard y para qué sirven?
- Los materiales principales son el poliuretano, para la capa externa rígida, y el poloxámero, un polímero tipo gel utilizado para el núcleo interno. Este último se elimina después de la impresión, dejando un canal hueco que permite el movimiento controlado cuando se presuriza.
- ¿Qué aplicaciones prácticas tiene la robótica blanda impresa en 3D?
- Las aplicaciones incluyen robótica quirúrgica, tecnologías asistivas portátiles, prótesis ligeras y sistemas de automatización industrial flexibles. Estos robots también pueden apoyar a pacientes en rehabilitación o proporcionar asistencia a personas con movilidad reducida.
- ¿De qué manera esta tecnología acelera el proceso de prototipado?
- Eliminando la necesidad de moldes y procesos multifase, el nuevo método permite imprimir directamente estructuras complejas con movimiento incorporado. Esto reduce los tiempos de producción y permite una personalización rápida y bajo demanda.