Robotique légère et impression 3D multimatière : comment construire un humanoïde souple
La production de robots légers et flexibles entre dans l'ère industrielle grâce à des techniques innovantes d'impression 3D qui intègrent des matériaux rigides et souples en un seul processus.
La robotique douce représente l'une des frontières les plus prometteuses de l'automatisation moderne, offrant des solutions plus sûres et adaptables que les systèmes rigides traditionnels. Au cœur de cette révolution se trouve un processus d'impression 3D multimatière développé à l'Université de Harvard, qui permet de créer des structures robotiques flexibles avec des mouvements programmés, éliminant la nécessité de moules et accélérant considérablement les temps de prototypage.
Introduction à la robotique douce et aux avantages de la légèreté
La robotique douce représente une rupture par rapport aux systèmes rigides traditionnels, offrant une plus grande sécurité et adaptabilité, notamment dans les contextes humains.
Les robots douces se distinguent de leurs prédécesseurs rigides par leur capacité à se déformer, s'adapter et interagir de manière sûre avec les êtres humains. Cette caractéristique les rend idéaux pour des applications médicales, l'assistance personnelle et les environnements où la collaboration homme-machine est essentielle. Le secteur de la robotique douce se trouve encore principalement en phase de recherche pure, mais le paysage de la recherche et développement a commencé à produire des exemples de commercialisation en phase initiale.
Les chercheurs ont commencé à se concentrer sur les avantages authentiques de la robotique douce par rapport aux contreparties plus rigides, et les capacités de conception ouvertes de la fabrication additive ont été fondamentales pour cette évolution. La légèreté des composants imprimés en 3D, combinée à la flexibilité des matériaux souples, permet de créer des systèmes robotiques qui consomment moins d'énergie et présentent moins de risques en cas de contact accidentel.
La technologie d'impression 3D multimatière
L'impression 3D multimatière permet l'intégration directe de composants rigides et souples, ouvrant de nouvelles possibilités pour des structures complexes et fonctionnelles.
L'impression 3D multimatière élimine les limites de l'impression à matériau unique ou de la coulée traditionnelle, permettant aux concepteurs d'incorporer des chemins d'actionnement, une rigidité graduée et des caractéristiques fonctionnelles sans assemblage supplémentaire. Cette technologie combine des élastomères souples et des polymères plus rigides en une seule construction, surmontant les limitations d'intégration des matériaux typiques des méthodes conventionnelles.
Le process permet de déposer plusieurs matériaux à travers une buse unique le long d'un parcours précis, avec la possibilité de changer rapidement de matériau et de créer des formes simples et hautement complexes. Cette capacité de construire des pièces directement à partir de projets numériques élimine les goulots d'étranglement de l'assemblage, réduit les délais de livraison et permet d'intégrer des canaux pneumatiques et d'autres éléments fonctionnels pendant l'impression elle-même.
L'approche multimatériau résout l'un des problèmes les plus épineux associés à la conception pour l'industrie robotique : la création de joints, d'articulations et de formes organiques qui nécessiteraient autrement des moules et des processus multifases.
Le Processus Innovatif de Harvard : Tête Rotative et Inflation Programmatique
Le système développé par le Wyss Institute combine la précision mécanique et la programmabilité morphologique via une tête rotative et des matériaux réactifs à l'inflation.
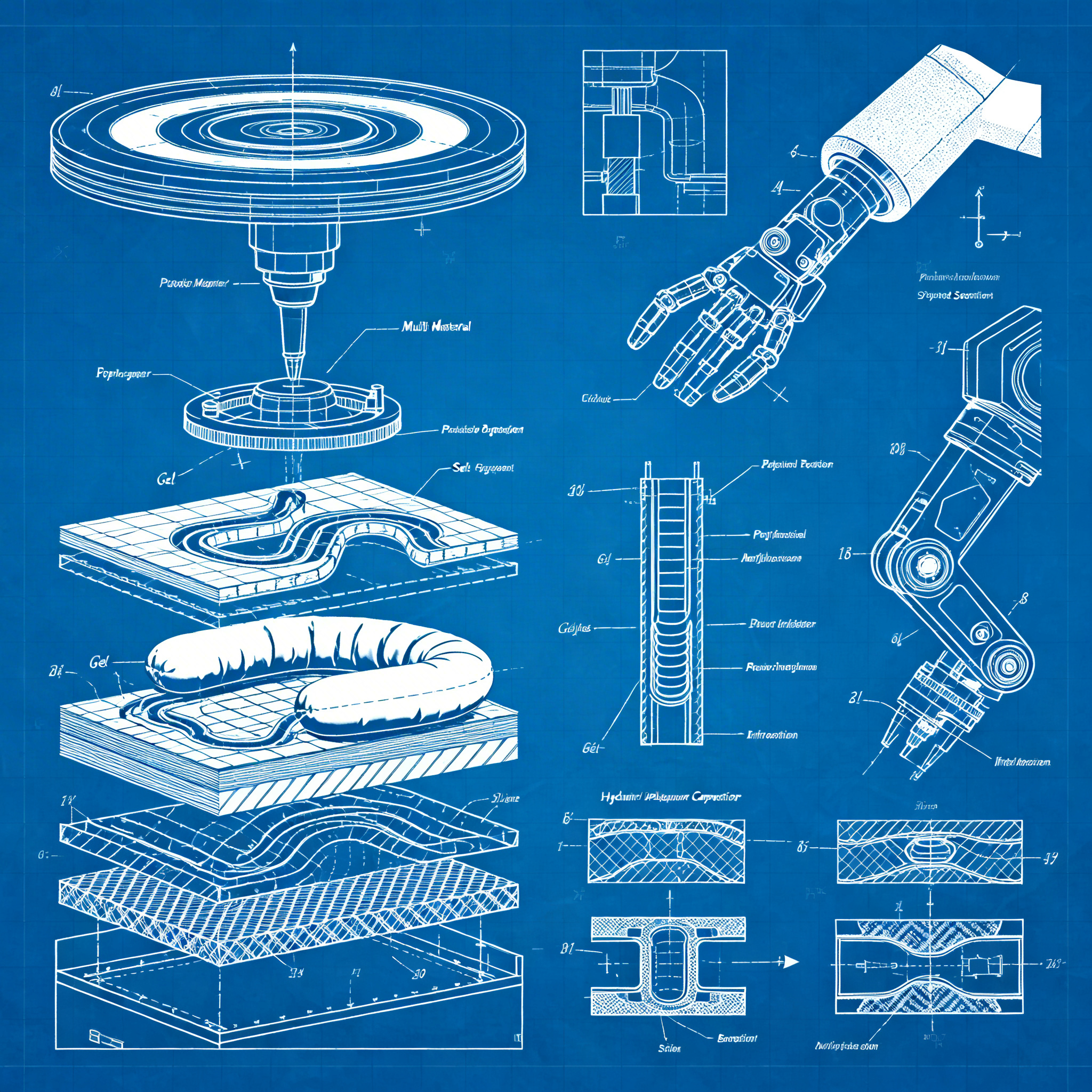
Le processus développé par les chercheurs de la School of Engineering and Applied Sciences de Harvard repose sur une imprimante rotative avec une buse multimatériau. Les utilisateurs impriment d'abord une coque en polymère rigide, puis superposent un polymère semblable à un gel, obtenant un canal lorsque la coque est complètement durcie, après quoi la substance la plus souple est lavée.
Une fois le produit final gonflé, le design intégré (“ formes programmées ”) émerge complètement, produisant des formes bio-inspirées dont la production nécessiterait autrement des moules et des matrices. Comme l'explique Jackson Wilt, étudiant diplômé ayant travaillé sur le projet : “ Nous utilisons deux matériaux depuis une seule sortie, qui peut être tournée pour programmer la direction dans laquelle le robot se plie lorsqu'il est gonflé. Dans ce travail, nous n'avons pas de moule. Nous imprimons les structures, nous les programmons rapidement et nous sommes capables de personnaliser rapidement l'actionnement. ”
Le processus prévoit la conception d'un canal interne réalisé en poloxamère, un polymère couramment utilisé dans les gels capillaires. En réglant la buse de l'imprimante 3D, sa vitesse de rotation et le débit du matériau, les chercheurs ont réussi à contrôler avec précision la forme, les dimensions et l'orientation de chaque canal. La structure est ensuite recouverte d'une membrane de polyuréthane. Une fois solidifiée, le noyau interne de poloxamère est retiré, obtenant une coque creuse qui peut être pressurisée pour se plier en différentes formes.
Ce mouvement rotatif permet non seulement un changement rapide de matériau, mais rend également possible la création de géométries complexes sans l'utilisation de moules traditionnels. Les chercheurs ont achevé leur travail dans le laboratoire de Jennifer Lewis, professeure Hansjorg Wyss d'Ingénierie Biologiquement Inspirée à SEAS, qui a été l'auteure principale de la première étude basée sur le processus sous-jacent, publiée en 2022. Ce projet précédent a démontré comment les formes hélicoïdales pouvaient être exploitées pour créer des joints et des charnières pour la robotique souple.
Matériaux et Géométries : Polymères de type Gel et Structures Bio-inspirées
L'utilisation de polymères hybrides permet la création de joints et de surfaces courbes sans supports, réduisant le poids et la complexité du design.
Le choix des matériaux est crucial pour le succès de la robotique douce imprimée en 3D. Le processus de Harvard utilise une combinaison de polyuréthane pour la couche externe rigide et de poloxamère pour le noyau interne de type gel. Cette combinaison permet d'obtenir des géométries complexes avec des canaux internes précis qui, une fois pressurisés avec de l'air, permettent des mouvements contrôlés et prévisibles.
Les canaux peuvent être disposés en configurations linéaires ainsi que dans des schémas plats ou surélevés. En réglant des paramètres comme la géométrie de la buse, la vitesse de rotation et le débit du matériau, les chercheurs ont contrôlé les dimensions, l'orientation et la géométrie de chaque canal interne avec une grande précision. Ce niveau de contrôle permet de créer des structures qui se contractent, saisissent des objets ou se dilatent en réponse à la pressurisation.
Pour démontrer la polyvalence de l'approche, l'équipe a imprimé en spirale une conception similaire à une fleur sur un parcours continu de style labyrinthe. Ils ont également créé une poignée à cinq doigts avec des sections articulées qui fonctionnent de manière similaire aux phalanges, capables de se plier de façon contrôlée. Certains des schémas d'exemple détaillés dans l'article sur Advanced Materials incluent des fleurs et des mains humaines, abordant l'un des problèmes les plus tenaces associés à la conception pour l'industrie robotique.
L'union de polymères rigides et de type gel permet d'obtenir des géométries complexes sans l'utilisation de moules traditionnels, réduisant considérablement le poids total du système robotique et simplifiant la conception. Cette approche résout des problèmes critiques dans la robotique légère, comme la réalisation d'articulations et de formes bio-inspirées qui imitent les structures naturelles.
Applications pratiques : Des prothèses aux assistants robotiques
Les avantages de la conception légère et flexible trouvent une application directe dans des domaines comme la réhabilitation et l'assistance personnelle.
Les applications potentielles de la robotique douce imprimée en 3D sont vastes et prometteuses. Selon Wilt, les résultats mettent en évidence comment des techniques de fabrication rapide comme celle-ci pourraient soutenir des applications allant de la robotique chirurgicale aux technologies d'assistance humaine. Le mouvement prévisible dans la robotique douce a traditionnellement dépendu de moules complexes et de processus de fabrication multi-étapes, ralentissant l'itération de la conception et limitant la personnalisation.
La nouvelle méthode est destinée à accélérer le développement de systèmes adaptatifs pour la robotique chirurgicale, les technologies d'assistance portables et l'automatisation industrielle flexible. La capacité de produire des dispositifs robotiques mous avec un mouvement intégré et programmable élimine les étapes d'assemblage et permet une prototypage plus rapide, une liberté de conception et une personnalisation à la demande par rapport à la production conventionnelle.
Dans la réhabilitation, les robots mous peuvent aider les patients à mobilité réduite, en fournissant un soutien délicat et adaptable. Dans l'assistance personnelle, ils peuvent aider les personnes âgées ou les personnes avec
article écrit à l'aide de systèmes d'intelligence artificielle
Questions & Réponses
- Quels sont les principaux avantages de la robotique douce par rapport aux robots traditionnels ?
- La robotique douce offre une plus grande sécurité et adaptabilité, surtout dans les environnements avec présence humaine. Les robots flexibles peuvent se déformer et interagir de manière sûre avec les humains, ce qui les rend idéaux pour les applications médicales et d'assistance personnelle.
- Comment fonctionne l'impression 3D multi-matériau développée par Harvard ?
- Le processus combine des polymères rigides et souples en une seule impression, éliminant le besoin d'assemblage. En utilis une tête rotative, les chercheurs créent des structures avec des canaux internes programmés qui se dégonflent lorsqu'ils sont gonflés.
- Quels matériaux sont utilisés dans le processus de Harvard et à quoi servent-ils ?
- Les matériaux principaux sont le polyuréthane, pour la couche externe rigide, et le poloxamère, un polymère de type gel utilisé pour le noyau interne. Ce dernier est retiré après l'impression, laissant un canal creux qui permet un mouvement contrôlé lorsqu'il est pressurisé.
- Quelles applications pratiques la robotique douce imprimée en 3D a-t-elle ?
- Les applications incluent la robotique chirurgicale, les technologies d'assistance portables, les prothèses légères et les systèmes d'automatisation industrielle flexibles. Ces robots peuvent également soutenir les patients en rééducation ou fournir une assistance aux personnes à mobilité réduite.
- Comment cette technologie accélère-t-elle le processus de prototypage ?
- En éliminant le besoin de moules et de processus multi-étapes, la nouvelle méthode permet d'imprimer directement des structures complexes avec un mouvement intégré. Cela réduit les délais de production et permet une personnalisation rapide et à la demande.